Collision Avoidance with Invertible Light® Technology
To measure the distances of obstacles and for 3D visualization of the same, we can attach several 3D sensors around the object to be guarded. The output of these sensors is fused and used to avoid a collision.
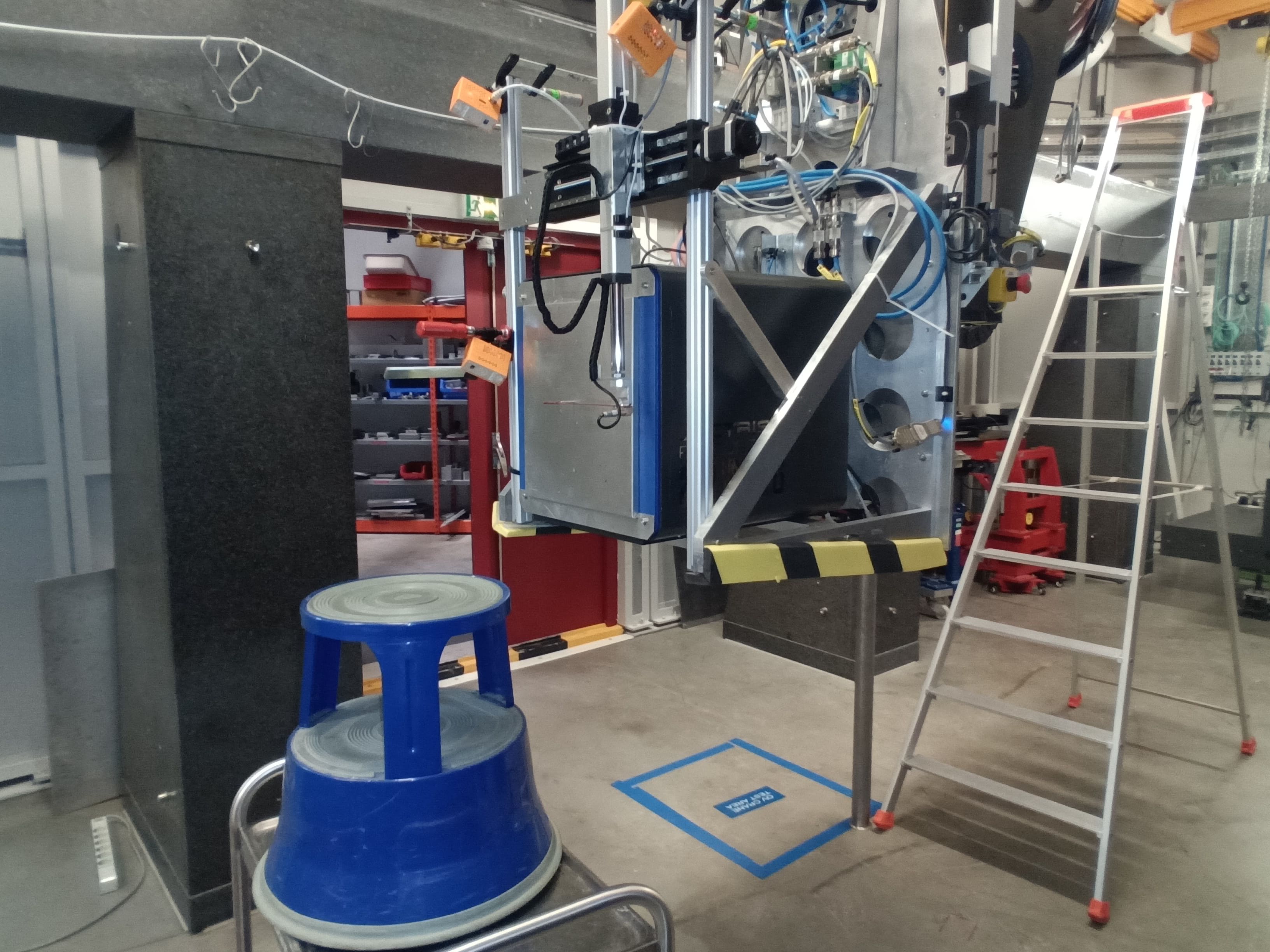
Environment and settings of the sensors.
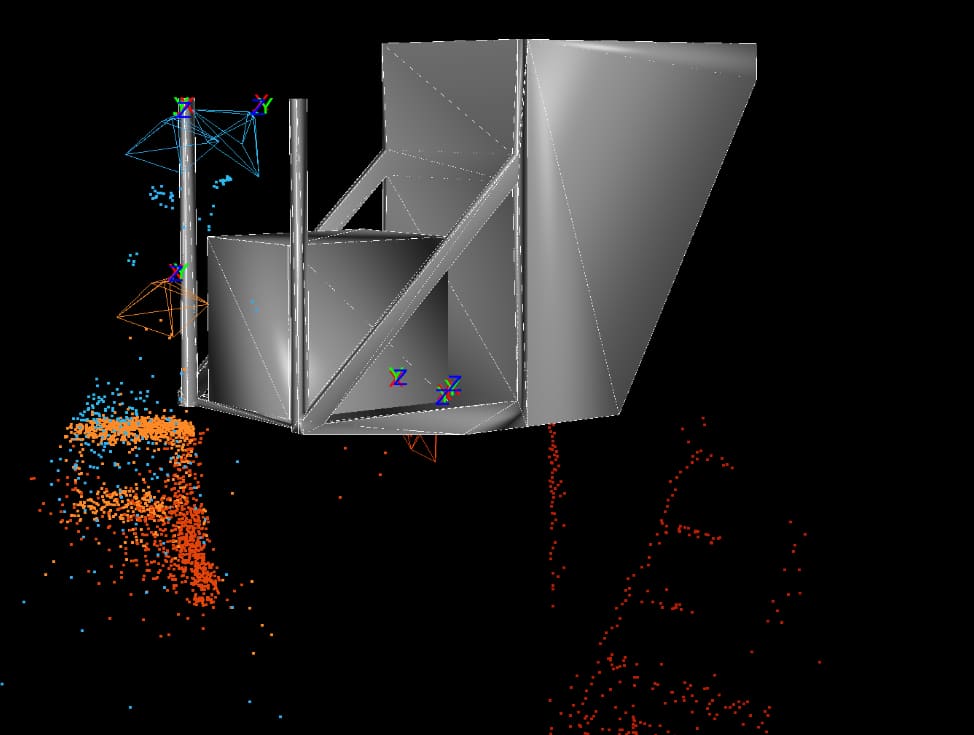
The 3D output of sensors.
As a real-life example, the ESRF ID31 beamline has expensive equipment that is remotely moved by the robot in their experimental room with many tools around it. It is essential that the equipment does not collide with anything which can lead to item damage and delay in ESRF experiments. MagikEye provided a solution where the controller can remotely see the surroundings of the expensive object to guard in real-time and all in 3D. As the raw data is in 3D, it is easy to detect obstacles and measure the distance to them, which is essential to prevent collisions. This is also very crucial to the planning of future movements in case of robot movement.


Example of installation of sensors for the MagikEye collision avoidance system at ESRF.
All this is possible with MagikEye’s ILT sensors that are fast, have low power consumption, and have low latency.
To summarize, our MagikEye collision avoidance system is:
- Already used by big science’s ESRF ID31 beamline to guard their precious tools,
- Remotely accessible from a separate room,
- Provides distance measurement to obstacles as well as 3D data, and
- Is a bespoke solution based on customer requirements.
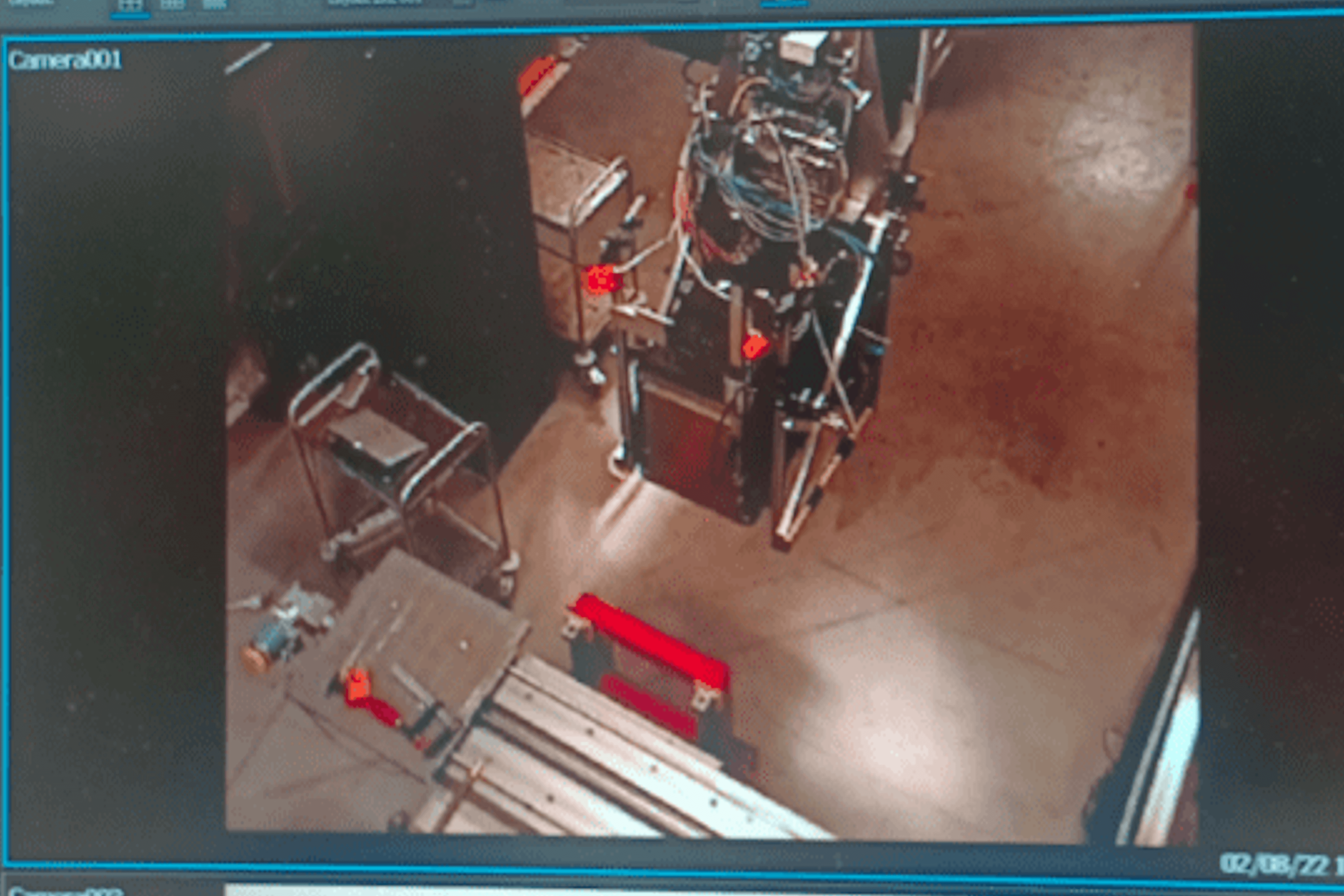
Standard RGB camera collision avoidance system.
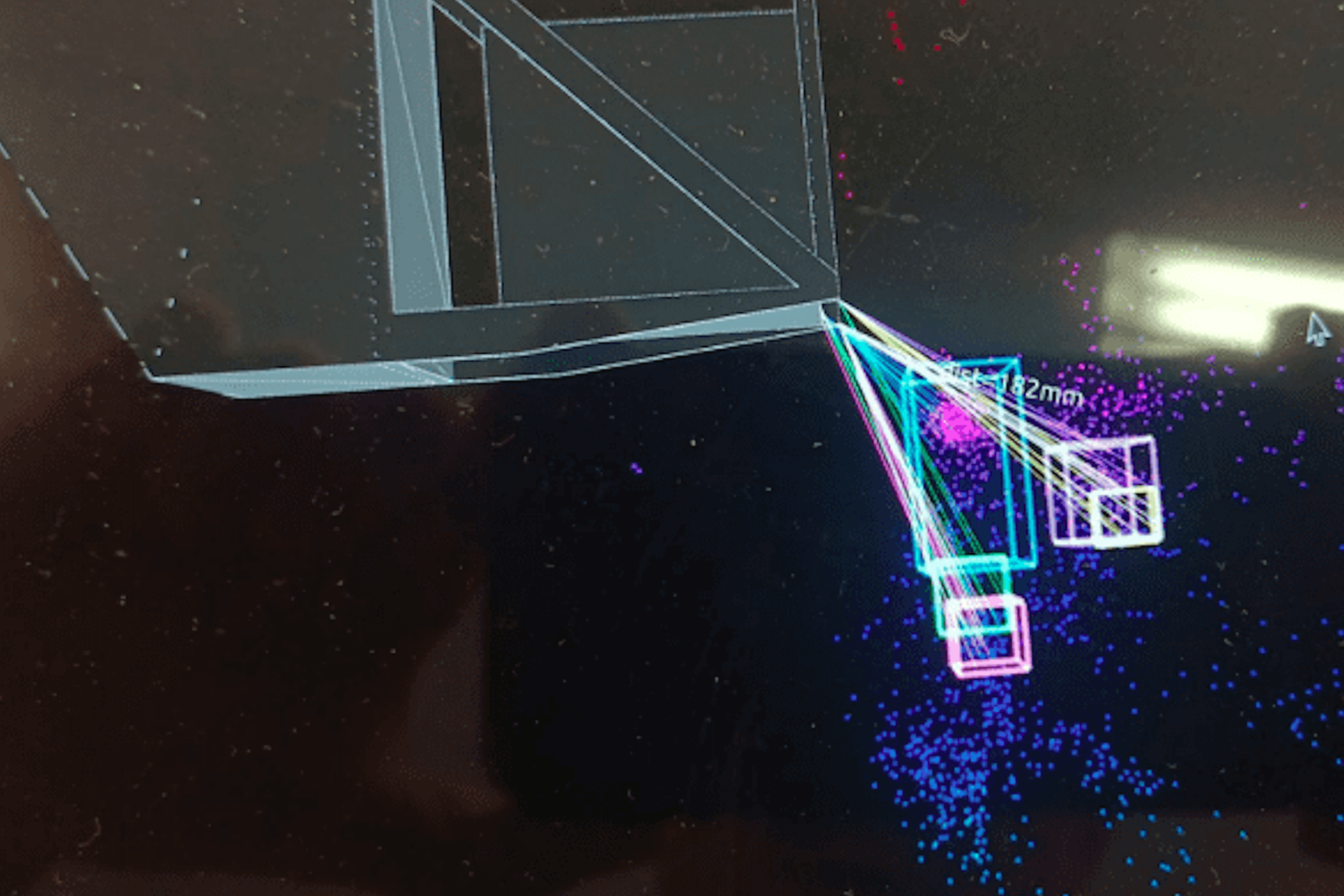
Example of output of MagikEye’s collision avoidance system
Please contact us via email for further information and to stay in touch!
sales@magik-eye.com